
Robot Gallery

開発者 Developer
今回のロボットは、以前のロボットと比較し大幅なベーススペックの向上が施されている。
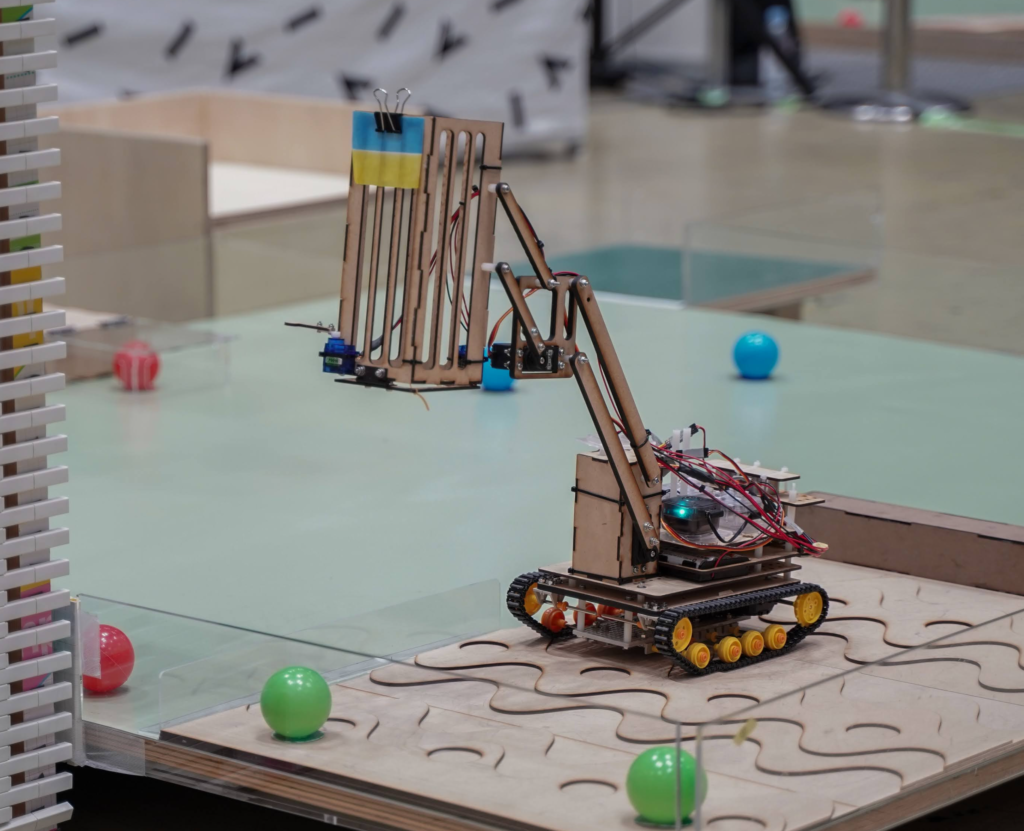
多くの履帯を採用したロボットは、転輪のシャフトの幅に沿って車幅を決めているため、車幅が非常に狭くなっている。それにより、VIVIWARE等を搭載するためのスペースを確保するため、細長く車高が高く不安定な仕様になっている。言うならば、今までのロボットをナローボディ&ハイルーフといったところだろうか。
それに比べ、今回は転輪部分のシャフトを2つに分離させ制作したため、車幅の自由度が上がった。これにより車幅を広くし、車高を低くしたため、多くの物を積載することができるようになっただけでなく、車高が低くなったため低重心化も実現されている。ワイドボディ&ロールーフといったところだろうか。
また、シャーシの設計を刷新しシャーシ部分に5.5mmMDFを使用し、高強度なシャーシを実現している。これも、多くの物の積載に耐えるためである。
また、新型の履帯・ギヤボックスを採用し、履帯の脱落のリスクが大幅に減少するとともに、パワーに余裕のある車体となった。
まとめると、車体の進化は
・車幅を広げたため、積載量が増え、低重心化がなされ安定している。
・5.5mmMDFをシャーシに使用し、高剛性な車体になっている。
・新型の履帯・ギヤボックスを採用し、信頼性が向上した。
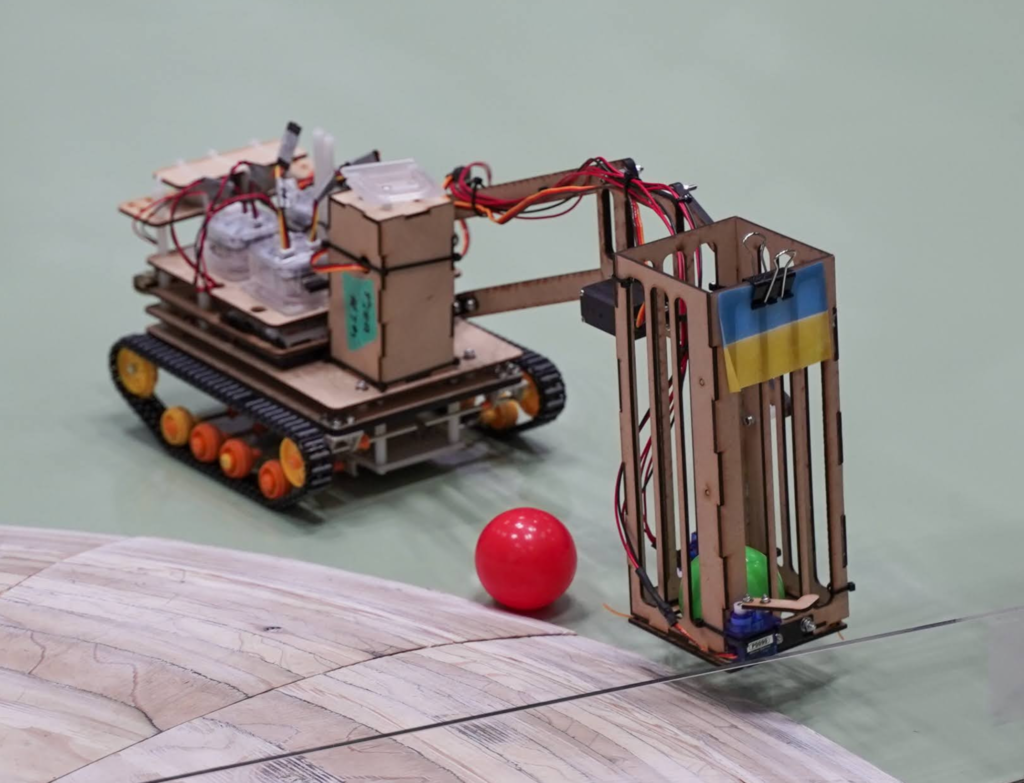
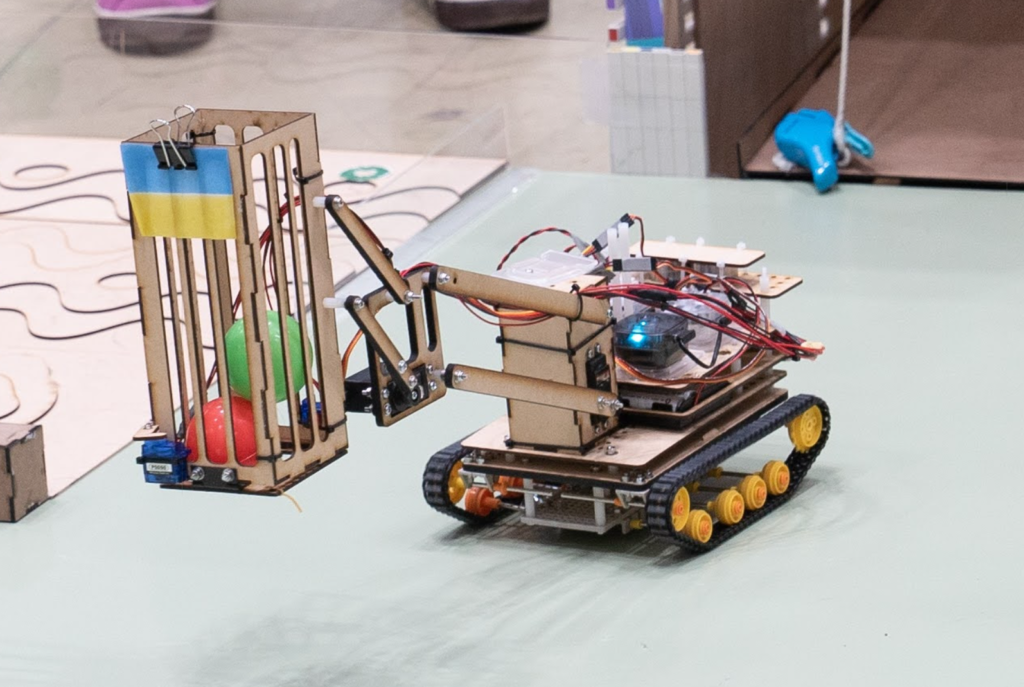
そんな進化した車体に、前回の筒形アームを大幅アップデートさせた、第二世代筒形アームを搭載。
以前のアームと比較して関節が2つになっているため、高台攻略などが簡単になる(はず)。
また、筒の蓋を自力で開けて閉めることが可能になっている。
今回のロボットは、車体から設計を刷新したため、より堅牢で堅実なつくりの車体となった。
そこに、大幅アップデートが施されたアームを投入したため、走攻守ともに高水準でまとめられたのではないか。
一方で、自分は履帯にこだわっているが履帯を採用するメリットが薄れているようにも感じ取れる(以前はステージにダート部分があった)。そろそろ、転換点なのだろうか。
【動画はこちら】
The new robot has significantly improved base specifications compared to previous robots.
Many robots employing crawlers have a very narrow vehicle width because the width of the vehicle is determined along the width of the shaft of the rolling wheels. This makes them long, narrow, high, and unstable in order to make room for VIVIWARE and other equipment. In other words, it is like a narrow body and high roof for a conventional robot.
In contrast, the shaft for the rolling wheels has been separated into two parts, allowing for greater flexibility in the width of the vehicle. This not only makes the car wider and lower in height, allowing it to carry more cargo, but also lowers the car’s center of gravity. It is a wide body and low roof.
In addition, the chassis design has been redesigned and 5.5mm MDF is used for the chassis portion to achieve a high-strength chassis. This is also to withstand the loading of a large number of objects.
In addition, a new crawler and gearbox have been adopted, greatly reducing the risk of the crawler falling off and providing the chassis with ample power.
In summary, the evolution of the vehicle body was
Such an evolved chassis is equipped with a second-generation tubular arm, a major update of the previous tubular arm.
Compared to the previous arm, it has two joints, which makes it easier to attack high ground, etc. (it should).
It is also possible to open and close the lid of the cylinder by itself.
This year’s robot was redesigned from the chassis down, resulting in a more robust and solid chassis.
The new arm, which has undergone a major update, has been introduced into this new design, and I believe that the robot has been put together at a high level both in terms of running and defense.
On the other hand, although I am particular about the crawler, I can sense that the advantages of adopting crawlers are diminishing (there used to be a dirt section on the stage). Is it time for a turning point?
【Youtube】
Share