Robot Gallery
開発者 Developer

こんにちは!
VIVISTOP HAKATAのクルー、さにぃです!
VIVITA ROBOCON in TOKYO 2023において最も難易度の高い技に挑戦することを最終目標に挑んだ今回のロボット製作。
ロボコン本番では、無事、高いところに空き缶を運ぶことが出来ました!(一安心)
製作段階で溢れ出た課題と解決のために考えたことをポチポチ書いていきます。
スタート位置と目標の位置を何回も往復するのは効率が悪いから、一気に何個か運んでしまおう!と相方のみぃみと話して目標を決定。
でも、それぞれの場所に置ける空き缶は一つずつ。テンプレロボみたいに空き缶を挟んで運ぶスタイルだと一つずつは置けない…
そこで思い浮かんだのが、、、「空港の預け荷物受け取り所」
あ、そうだ、スライドさせれば一個ずつ出てくるんだ!
ということで、「キャタピラ」を使って両側から空き缶を挟むようにして持てば、一気に何個も運べるし、一個ずつ送り出すことができると考えてロボット製作へ。
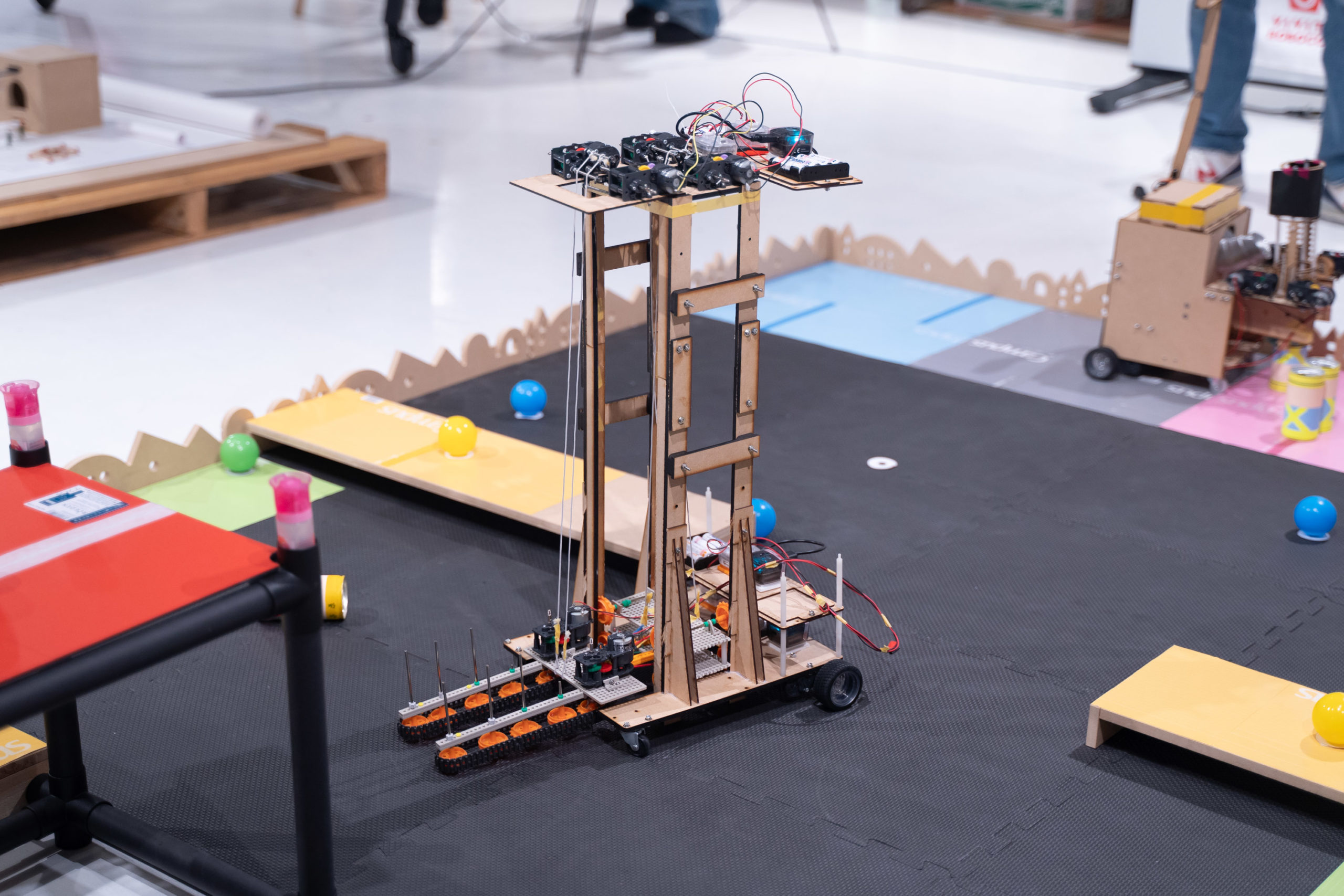
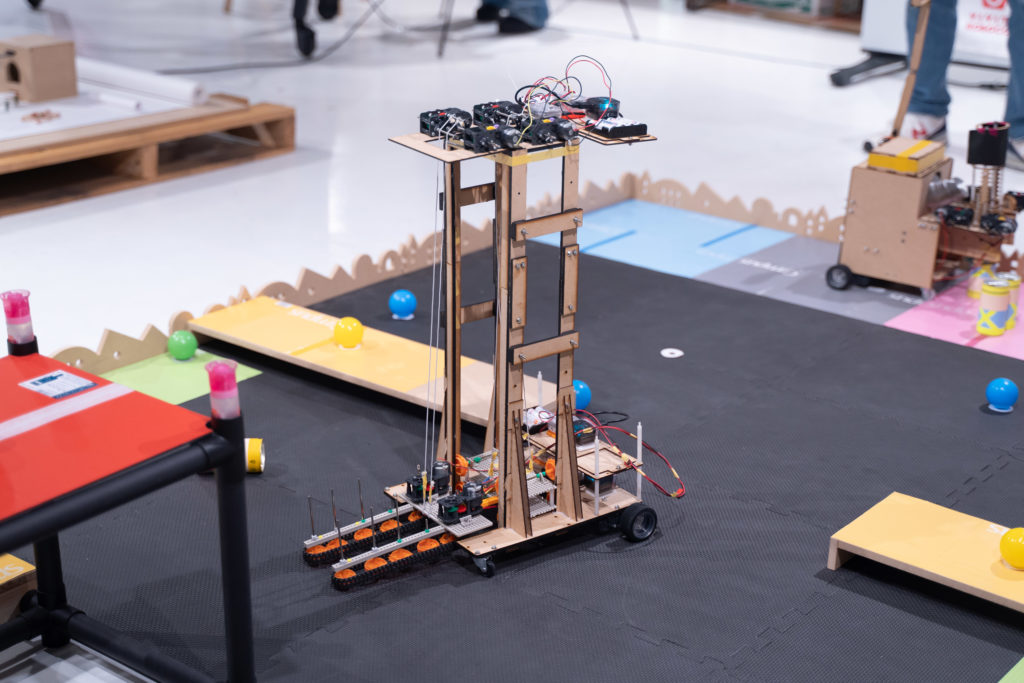
その完成品が下の写真。

特に難しいことはなかったけど、ギアボックスをいつもとは違う縦向きで配置するので、その位置合わせの時には、他のクルーに手伝ってもらいました。ありがとう!
このロボットの最大の特徴である「アームが上下する」機構。
初めに言っときます、めっっっっっっっちゃ苦戦しました。
キャタピラのレールを敷いた支柱を4本立て、アーム本体に接続されたギアにギザギザのタイヤを取り付け、タイヤが回るとキャタピラのレールと嚙み合ってアーム本体が昇降するという仕組み
→アーム本体にギアボックスが4つ搭載されていて、重すぎて上がらない。
アームのキャタピラを回転させるギアを軽いものに付け替える。
→空き缶を巻き込む際にギアのトルクが小さすぎて回転力不足。やっぱりアームを回転させるギアボックスは従来の重いものじゃないと…
エレベーター式(吊り下げ型)へ移行。
キャタピラレールだと、アーム本体にギアボックス等を設置しないといけないため、重量の問題が多い。よって、ギアボックス等を天井に取り付け、上から紐で吊るされたアーム本体を巻き上げ昇降する機構を設計。
→実験の結果、巻き上げ用のギアボックスは4つあれば、巻き上げることが可能。だがしかし、下ろす際にアーム側が重く、斜めに傾いてしまうため、どうしても本体が引っ掛かってしまい、上手く下がってくれない…
この時点で東京にロボットを郵送しないといけない期日の前日。まあ、どうにかなってくれ!と祈ってロボットだけ、東京へ。
そして、本番当日、巻き上げ用のギアボックスのスピードを調節して、ここで最終手段!
かっしーさんにミツロウをお借りして、ヌルヌルに塗りたくって、アーム本体を下げる際の摩擦を少しでも減らして挑んだ。
自分で作ったロボットなのに本番で初めての操縦。どうなることか、本当に不安だったが、、、、なんと、奇跡的に動いてる!!
上手く高いところに空き缶を運ぶことができて安心安心。
でも、気が付いたら残り時間も束の間。「満点取るぞ!」っていうみぃみと決めた目標にはまったく及ばずすぐに反省。
また来年あったら満点取れるロボットを作りたい!満点取るには練習をもっとしないと!


文章長くてスミマセン。
最後に一つ、このロボット製作で自分が貫いたことを書こうと思います!
アーム本体が重くて上下しない…そんな課題があったら、もっと強いギアボックスを買えばいい!ってのは誰もが思いつく解決策。
解決策としては早いけど、面白くない!ここにあるもので絶対作ってみせる!
ものづくり好き人間のプライド?でしょうか。
その信念だけは曲げずに工夫に工夫を重ね、何とか本番までたどり着きました。
「欲しい物がない時、お金で買う前に身の回りの物で作れるかを考えることの大切さと買わずに作れた時のおもしろおもしろさ」
そんなことが、メンバーの子たちにも伝わっていればいいな、と思います。伝わってるかなぁ。そんな感じで見てる人はいないだろうなぁ。(笑)
最後に、VIVITAロボコン東京大会、とても楽しかったです!
チームメイトとして一緒に頑張ったみぃみ、ありがとう!
対戦相手として大会を盛り上げてくれた全国、世界のみなさんもありがとう!!
アドバイスをくれたかっしーさん、VIVITAのみなさんありがとうございました。
そして、知らないところで応援グッズ作って、会場でもリモートでも応援してくれたVIVISTP HAKATAのメンバー・クルーのみんな、本当にありがとう!!!


Hello, I’m Sunny, a crew member of VIVISTOP HAKATA!
This time, we built a robot with the ultimate goal of challenging the most difficult feat at the VIVITA ROBOCON in TOKYO 2023.
At the Robocon, the robot was able to carry an empty can to a high place without any problems! (A relief).
Here are some of the issues that arose during the construction phase and the things we thought of to solve them.
It is inefficient to go back and forth between the starting position and the target position, so let’s carry several cans at once,” I said to my partner Mimi! I talked with Mimi, my partner, and we decided on the target.
But we could only place one empty can at each location. If we were to carry the cans between them like Template Robot, we couldn’t place one can at a time….
Then I thought of the airport baggage claim area.
Oh, that’s right, if you slide them out, they come out one by one!
So, we decided to build a robot that could carry several cans at once and send them out one by one by using “caterpillars” to hold the cans between both sides.
The finished product is shown in the photo below.
It wasn’t particularly difficult, but I had to position the gearbox in a different vertical orientation than usual, so the other crew members helped me with that alignment. Thanks!
The most distinctive feature of this robot is the mechanism of the arm that goes up and down.
Let me say at the outset that it was a very difficult task.
Proposal 1:
Four pillars with caterpillar rails are set up, and jagged tires are attached to gears connected to the arm body.
→The arm itself is equipped with four gearboxes and is too heavy to lift.
Elevation plan (2):
Replace the gear that rotates the caterpillar of the arm with a lighter one.
→The torque of the gear is too small to rotate enough to roll in an empty can. The gearbox to rotate the arm must be a conventional heavy one…
Elevation plan (3):
Shift to an elevator type (suspended type).
With caterpillar rail, there are many weight problems because the gearbox and other components must be installed on the arm itself. Therefore, we designed a mechanism in which a gear box, etc., is mounted on the ceiling, and the arm itself, suspended by a string from above, is hoisted up and down.
→As a result of experiments, four gearboxes are enough to wind up the arm. However, when lowering the arm, the arm side is heavy and tilts at an angle, so the main body inevitably gets caught and does not lower properly…
At this point, it was the day before the due date when we had to mail the robot to Tokyo. Well, it’s going to have to be done somehow! I prayed and sent the robot to Tokyo.
Then, on the day of the show, we adjusted the speed of the gearbox for winding up, and here was the last resort!
I borrowed some beeswax from Kassy and smeared it on the robot to reduce friction when lowering the arm itself.
This was the first time to operate a robot I had made myself, but it was my first time to operate it in a production. I was really anxious about what would happen, but to my 、、、、 surprise, it miraculously moved!
I was relieved and relieved that I could successfully carry the empty cans to a high place.
But then I realized that I had only a short time left. I’m going to get a perfect score! I immediately felt sorry for not reaching the goal that Miimi and I had set.
Next year, I want to make a robot that can get a perfect score! To get a perfect score, I need to practice more!
Sorry for the long sentence.
I would like to write one last thing that I have carried through in this robot making!
The arm itself is too heavy to go up and down… If you have such an issue, just buy a stronger gearbox! is the solution that everyone comes up with.
It’s a quick solution, but it’s not fun! I will definitely make it with what I have here!
Is that the pride of people who like to make things? The pride of people who love to make things?
We kept this belief and put our ingenuity to the test, and somehow we managed to make it to the final production stage.
When there is nothing you want, it is important to think about whether you can make it with what is around you before buying it with money, and it is fun and interesting when you can make it without buying it.
I hope that these things were conveyed to the children of the members. I wonder if they get it. I don’t think anyone is looking at it that way. (Laughs)
Finally, the VIVITA Robocon Tokyo was a lot of fun!
Thanks to Miimi, who worked hard with me as a teammate!
Thanks also to everyone from all over the country and the world who made the competition so much fun as my opponents!
Thanks to Kassy and everyone at VIVITA for the advice.
And thanks to all the members and crew of VIVISTP HAKATA who made support goods without my knowledge and cheered me up both at the venue and remotely!
Share