Robot Gallery

開発者 Developer
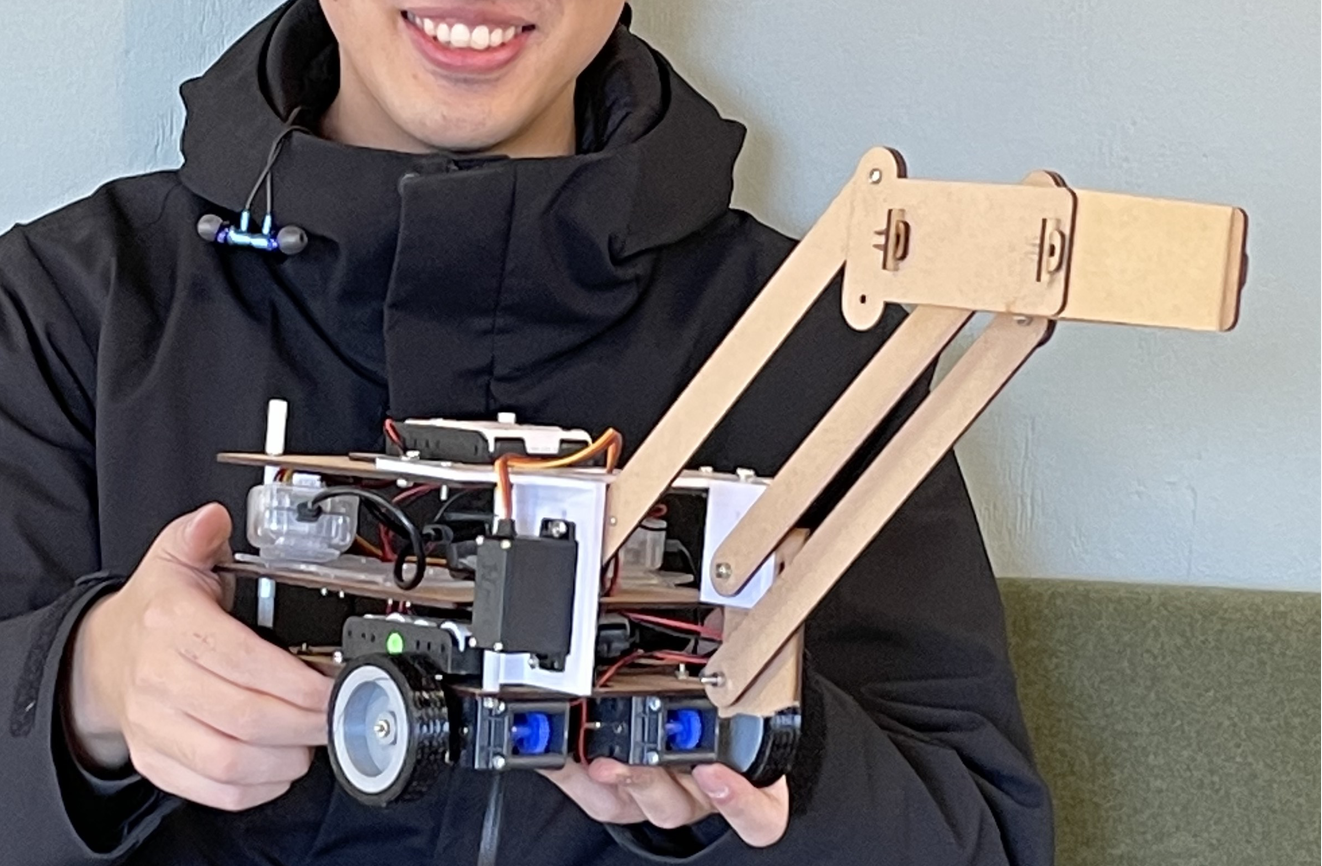
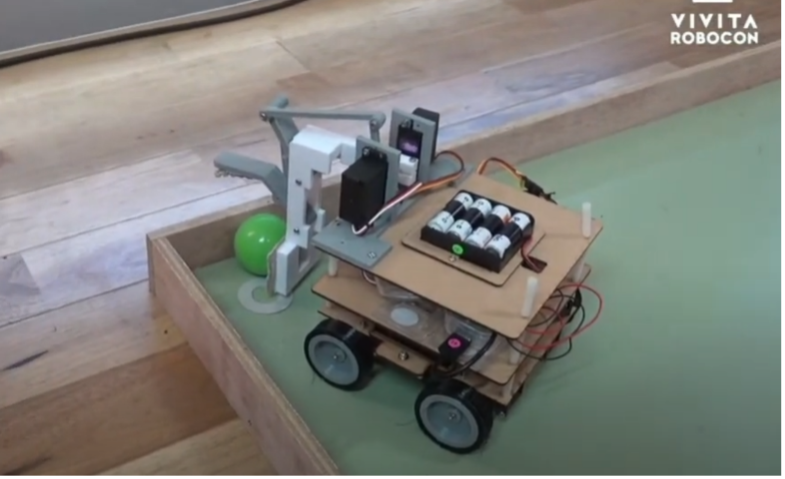
設計のテーマは「4WD」と「モジュール化」。
脚周りとアーム、ハンド部は独立して設計、換装ができるようになっている。
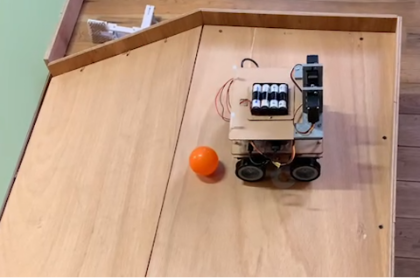
脚周りは4輪ともモータで駆動させる4WD方式にしているので、坂道でも滑りやすい道でも難なく、走行することができる。
また、いい感じの車輪を求めた結果、4車輪とも3Dプリント(車輪の外側をTPU、内側をPLA)で製作した。
会社で4wdの脚周りロボットを扱ったことで、真似してみようと思い作成。思った以上にいい動きをしたので好きになってしまった。
重心も下になるように設計しているため、安定して走行できる。坂道でもしっかり止まってくれる。
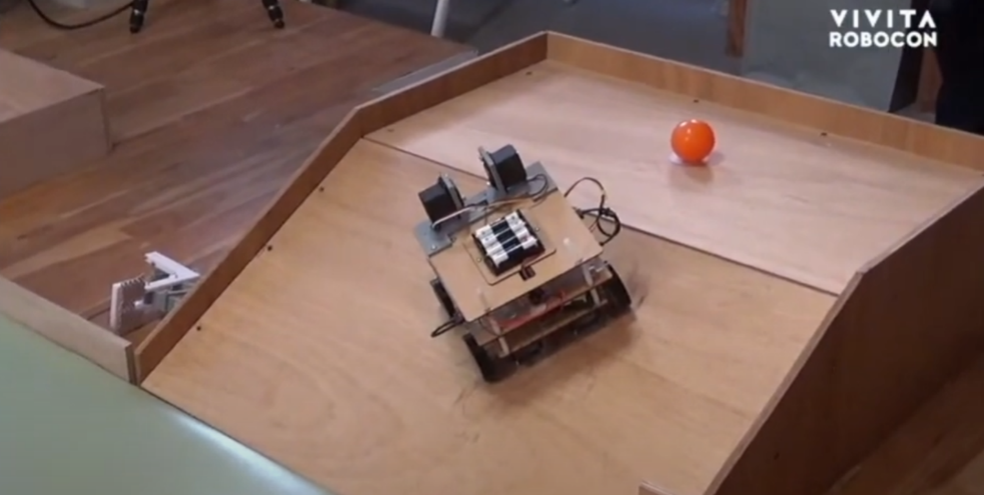
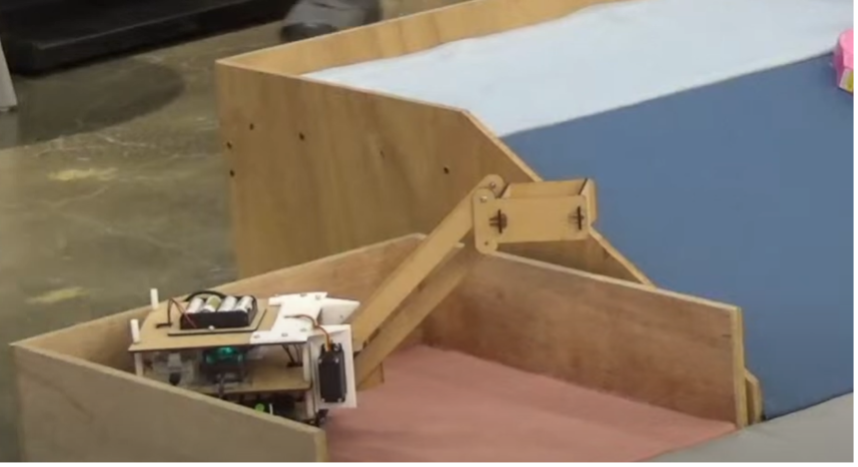
この脚回りの踏破性のおかげでTHE CAMPUSでの大会では、すべてのエリアに進入できた数少ないロボットとなれた。
アーム、ハンド部はCO-SAKU谷の大会では3Dプリントのリンク機構を使用。
前回から変更しており、リンク機構を使ったハンドになっている。
しかし、剛性はあまり高くないため、破損してしまった。
この時にリンクは素直にレーザカッターで切り出した素材を使うべきであると教訓を得た。
そのため、THE CAMPUSでの大会では、MDFをレーザカットしたリンク機構を使用。
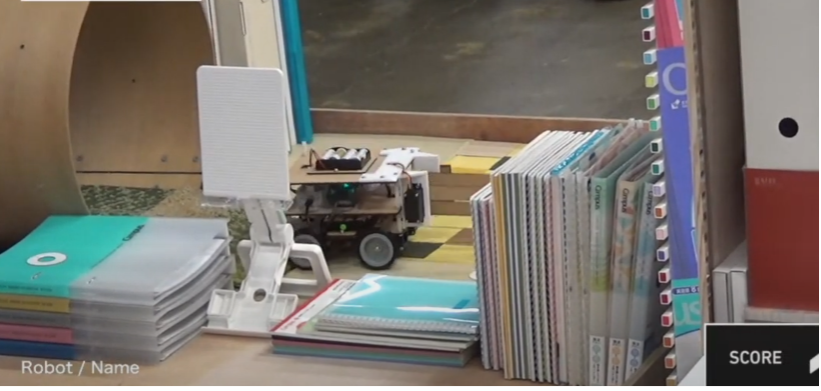
また、つかまずにボールを引きずって運べるようなアームに変更し、ボールをキャッチする部分の剛性を高くした。
結果的にボールをよくとることができたが、隅のボールが取りにくい、ボールを持ったまま段差が越えられないなどの反省点はあった。
Share